

一、引言
2025年CES展会上,最令人印象深刻的莫过于琳琅满目的机器人产品。多家企业现场演示了机器人叠衣服、做整理、处理家务的场景,让人不禁畅想:我们这代人靠机器人养老的愿景,究竟还有多远?本文将从资本市场、行业格局、技术路径、产品形态和成本演进等维度,对家庭机器人的发展前景做一次系统梳理。
二、资本市场:大模型之后的又一轮融资狂潮
回顾过去三年融资规模超过1亿美元的具身智能公司,可以清晰地看到,这是继大模型之后又一轮高度集中的融资热潮。
其核心特征如下:
第一,融资规模急剧膨胀。 2023年,全球具身智能领域的融资总规模约为50亿元;而到2025年,这一数字已飙升至400-500亿元量级,增长近十倍。
第二,头部效应极为显著。 具有深厚学术或工业背景的明星公司占据了绝大多数融资份额,TOP10企业拿走了超过40%的融资总额。其中,美国的Figure AI一家便融资近20亿美元。
第三,融资节奏极快,轮次显著前移。 整体融资以中美两国企业为主,融资频次极为密集。许多公司天使轮融资即已过亿,A轮可以完成四五次,单轮融资五六亿美元屡见不鲜。
这波热潮的根本驱动力,在于大模型与机器人结合所展现出的巨大潜力。事实上,优必选、宇树科技等企业已经成立十余年,机器人行业并不新鲜。过去之所以未能引爆资本热情,根本原因在于机器人缺少足够聪明的"大脑"——再精密的机械结构,没有智能化的控制系统,也不过是一具"铁疙瘩"。而工业场景中的传统机械臂业务已高度成熟,不足以成为资本追逐的焦点。大模型能力的快速进化,为机器人赋予了更强的感知、推理和决策能力,使得软硬件融合的具身智能迅速成为行业热点。
值得关注的是,相较大模型赛道,具身智能的资本化进程更加激进。2023年大模型融资潮至今,国内仅智谱和MiniMax完成了上市进程;而机器人赛道从2024-2025年才开始批量融资,但预计2026-2027年就将出现扎堆上市的局面。虽然绝对融资额尚不及大模型,但融资频度和推进速度远超前者。
在这一热潮之下,泡沫在所难免。但资本对行业发展的推动作用不可否认,高度竞争乃至内卷将加速产品能力的迭代进化,机器人走进家庭的时间线也可能因此大幅提前。
三、技术现状:从"跳舞"到"干活"还有多远?
去年春晚上宇树机器人的表演曾令人惊艳,但彼时的能力也仅限于"跳个舞"。短短一年之间,国内已有大量机器人能够完成空翻、拳击等高难度动作,进步肉眼可见。
然而,另一个现实同样不容回避:这些机器人除了跳舞、打拳击、参加"运动会"之外,真正能改变日常生活的有价值场景仍然有限。这正是当前浪潮下值得深思的问题——远景固然美好,但以什么形式、什么节奏实现落地,才是核心挑战。
用自动驾驶的分级逻辑来类比
如果借鉴自动驾驶L0到L4的分级框架来审视当前机器人的发展阶段,可以做如下判断:目前能够完成跳舞、拳击等动作的机器人,整体仍处于L1到L2的过渡阶段。
当前机器人的核心突破主要体现在两个方面:
硬件层面: 以宇树科技为代表的电驱系统在轻量化、高强度结构和高性能驱动系统上取得了显著进展。
算法层面: 高响应的动态平衡算法使机器人能够完成空翻、舞蹈、拳击等高难度动作。这些动作如果仅依赖固定编程是极难实现的——地面稍有差异便可能导致动作失败,因此这已经是一个相当重要的技术突破。
这意味着机器人的能力已经从预设动作的机械执行,跃迁到了一定程度的自主感知、决策与执行。硬件提供了灵活性和力量的基础,控制算法解决了动态平衡问题,AI赋予了一定的自主学习和实时决策能力。三者协同,使机器人从单纯的"机械表演者"升级为"具备一定智能的执行者"。
但要实现真正的通用人形机器人,核心能力必须体现为:在非结构化场景(如家庭环境)中,能够长期自主交互,真正成为人类的AI保姆和AI管家。 这一目标的实现仍需一步步推进。
四、行业格局:三类玩家各有优劣
相比大模型领域,具身智能要实现真正的破局,需要"AI+硬件+生态"三位一体形成完整闭环,难度显然更大。最终的行业格局将属于少数玩家。
目前参与竞争的企业大致可分为三类:
1. AI原生初创企业
这类企业是当前融资浪潮中最受资本青睐的群体。它们没有历史包袱,决策高效,在技术探索上灵活甚至激进。但短板同样明显:在硬件设计、供应链管理和场景落地方面缺乏积累,生产成本高,议价能力弱,许多企业还需要自建商务渠道来寻找应用场景。
2. 传统制造业巨头
以发那科、库卡、ABB等工业机器人巨头为代表。它们拥有大量成熟的落地场景,且本身已经实现盈利。随着智能化能力的提升,更强大的机械臂和智能机器人可以直接嫁接到原有场景中快速落地。但这类企业往往存在思维固化、创新能力不足的问题,受内部利益和既有商业模式的制约,对过往产品存在路径依赖,创新速度较慢。
3. 互联网科技巨头
以谷歌和英伟达为代表。它们在硬件端的直接投入或许不多,但核心竞争力体现在机器人大模型的底层能力上。谷歌推出了RT-2等模型,英伟达则提供了一系列工具链。机器人并不能完全复用现有的大语言模型或生成模型,还需要端到端的VLA模型和世界模型——而正是这类模型能力的突破,构成了本轮具身智能热潮的根本驱动力。这类公司在底层技术复用和数据优势方面具有明显优势,且未来机器人要进入家庭,必须与互联网生态打通,需要C端认知度,这些公司在销售渠道上也具备先天优势。
因此,尽管当前浪潮火热,最终的结果可能会非常残酷。 正如国内大模型赛道最终跑出来的仍然是字节跳动、阿里巴巴这类互联网巨头,具身智能领域极有可能呈现类似的终局格局。
五、商业化路径:价值阶梯的渐进式演进
具身智能的商业化落地,整体遵循"价值阶梯"的演进模式,由高ROI、低复杂度的确定性场景逐步向高复杂度场景扩展。
第一梯队:高确定性的工业与商业场景(率先爆发)
工业制造: 上料、喷涂、搬运
公共安全: 巡检、巡逻、安防、运输
仓储物流: 码垛、搬运、装卸
这些场景任务单一、环境相对固定,处于高度确定化的作业空间中,且预期收益明确,有望率先迎来规模化爆发。
第二梯队:体验培育型场景(建立认知)
春晚等大型演出中的机器人表演
工业展厅的引导展示
餐饮服务的迎宾娱乐
这类场景的核心价值在于帮助公众建立对具身智能的认知和体验。可以预见,2025年各大电视台的春晚一定会出现机器人扎堆表演的场面。
第三梯队:家庭场景(远景探索)
通用家庭服务机器人目前仍处于远景探索阶段,但预计未来十年内有望大规模走进普通家庭。
六、形态演进:家庭机器人不一定要"像人"
不同应用场景对机器人形态有着截然不同的需求。工业场景追求高产出和低成本,形态设计围绕效率最大化展开,因此固定式机械臂是最常见的形态。而家庭场景除了功能性之外,还需要考虑与人交互时的情感亲和度——家庭是生活空间,机器人不仅要实用,还要在外观和交互上给人亲切友好的感觉。这体现了B端与C端在服务理念上的本质差异:C端在满足功能需求的同时,必须高度注重情感体验。
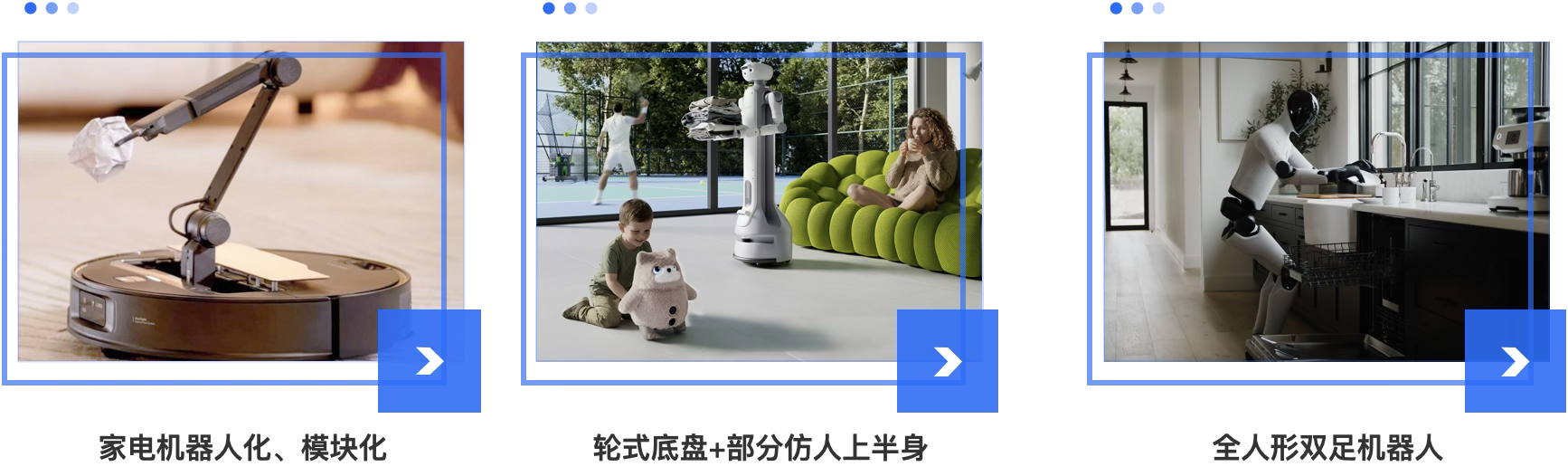
家庭机器人形态演进的三个阶段
第一阶段:家电的机器人化。 CES上已经可以看到,石头科技、追觅等企业在扫地机器人上加装了机械臂。原有的扫地机能实现地面清洁、吸尘和自动拖地,但遇到数据线、袜子、拖鞋甚至垃圾只能绕行。通过机械臂,扫地机能够实现地面简单物品的收纳功能,这一能力已经在部分产品上实现了落地。此外还有一些模块化尝试,例如SwitchBot的模块化机器人,以扫地机底盘为基础,通过搭载不同模块实现多样化功能。
第二阶段:轮式底盘+仿人上半身。 结构简单,移动效率高,底盘可搭载较大容量电池以满足续航需求,配合双臂可以完成大部分家务操作。
第三阶段:全人形双足机器人。 这是最终形态,能够实现对人的通用替代,与智能家电、家居系统协同协作,全面覆盖生活各类场景,满足功能与情感的双重需求。
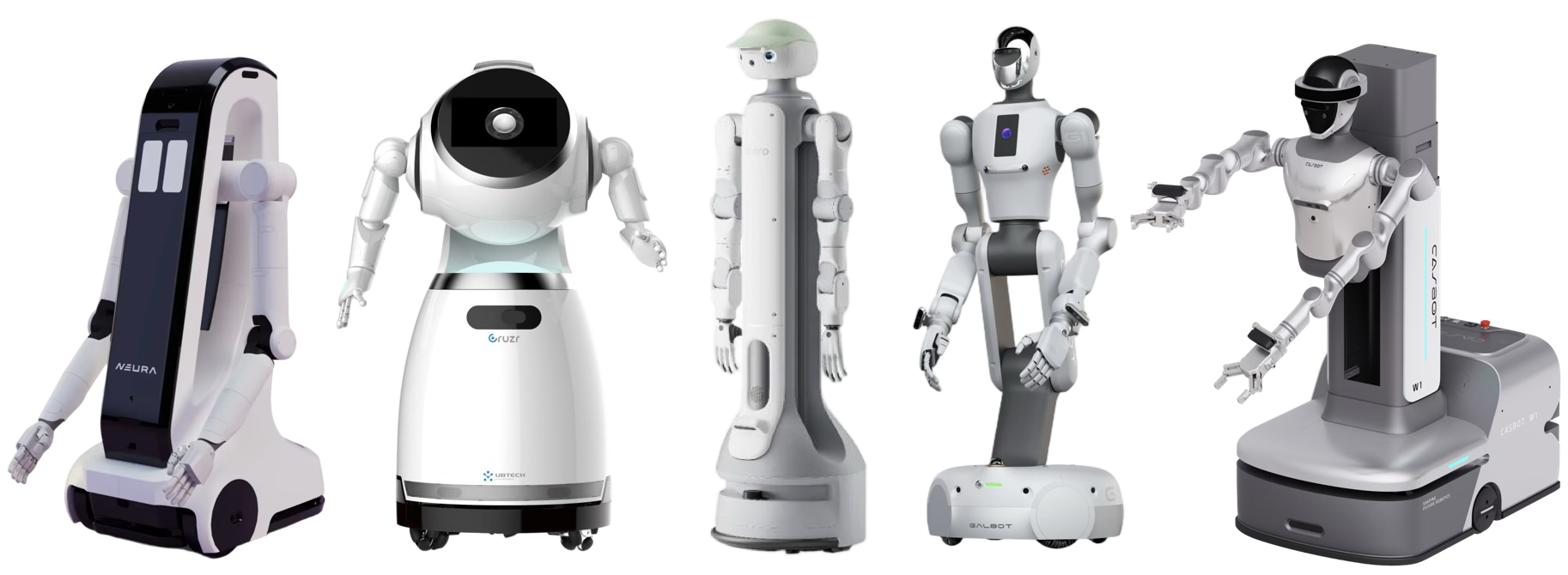
七、短期最优解:为什么"半人马形态"更合适?
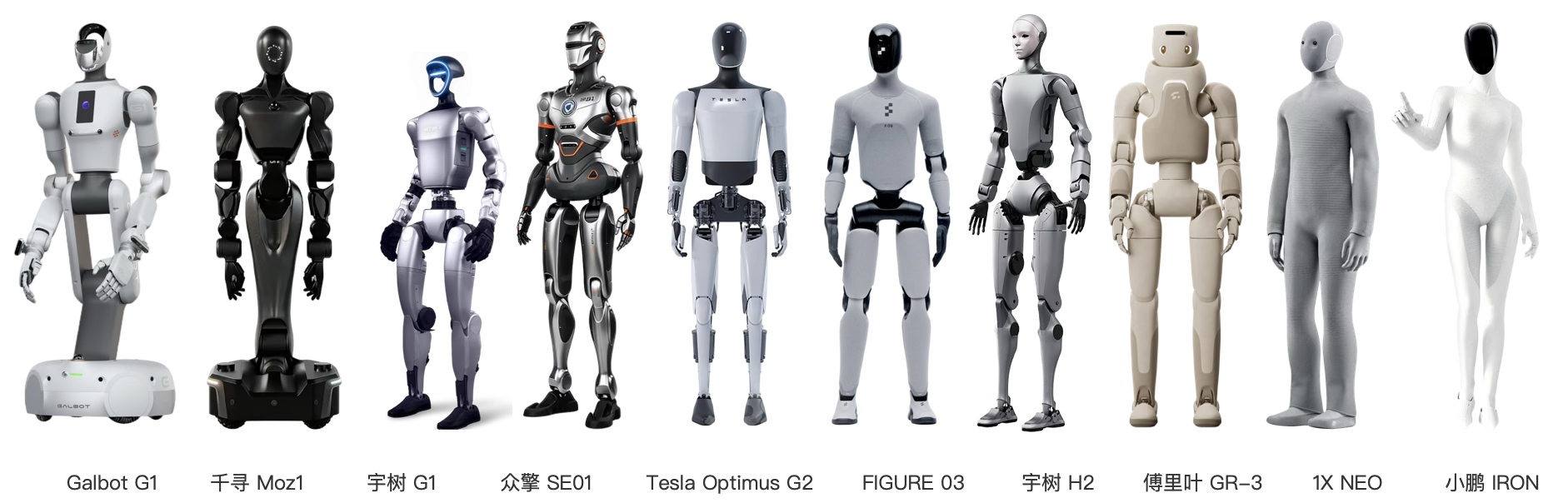
CES上展示了大量人形机器人,包括小鹏的Iron、傅里叶的GR-2、宇树的G1、众擎的产品等。但对于家庭场景而言,现阶段是否一定要追求高度拟人的人形?答案是未必。
人形机器人的现实困境
BOM成本过高: 为维持双足平衡,下肢需要10-12个高扭矩密度的关节模组,仅此一项成本就达数千美元。宇树G1的定价为9.9万元人民币,这一价位的普及度仍然有限。
可靠性不足: 双足行走的稳定性尚无法达到家庭安全标准。各类展会上机器人"翻车"频发——在表演场景中尚可接受,但在家庭环境中,一旦倾倒砸到老人、孩子或宠物,后果不堪设想。
能源效率低下: 双足机器人即便仅维持站立姿态就需要巨大的能量消耗,这也是CES上许多机器人需要悬挂展示的原因。
场景适配性有限: 双足的最大优势在于可以爬楼梯、应对不平整地面,但90%的家庭地面是平坦的。即便有楼梯的住宅,每层配置一台机器人也比让一台机器人爬楼梯更为合理。
"半人马形态"的优势
轮式底盘+升降躯干+双臂的"半人马形态",在当前技术和成本条件下是更优的解决方案:
移动效率高: 轮式底盘能够流畅通过门槛、地毯等常见家庭障碍,虽然无法应对较高的台阶,但已能适应绝大多数家庭场景。
操作范围广: 通过伸缩式躯干设计配合双臂,既可以从地面拾取物品,也可以将物品放置到高处,基本覆盖家庭空间中的绝大多数操作需求。
成本可控: 省去了双足行走所需的大量高扭矩关节模组,BOM成本显著降低,有助于加速规模化普及。
安全性更高: 轮式底盘重心低、稳定性强,不存在倾倒风险,在家庭环境中的安全系数远高于双足机器人。
能源效率优越: 轮式移动的能耗远低于双足步行,底盘可搭载大容量电池,续航表现更佳。
警惕"恐怖谷效应"
在形态设计上,还需特别关注"恐怖谷效应"(Uncanny Valley)。这一由日本机器人专家森政弘在50多年前提出的心理学假说指出:人类对高度仿真但不完美的类人对象会产生不适、诡异甚至恐惧的情绪反应。
一个仅有上半身在轮式底盘上晃动的机器人,或者机械结构不够仿生却配上一张硅胶面孔的机器人,都会引发强烈的心理不适。因此,家庭机器人在设计上应当做到"有灵性但不拟人"——通过屏幕表情等方式赋予机器人亲和力与灵动感,而非刻意追求拟人化外观。这种设计策略不仅能有效规避恐怖谷效应,还能进一步降低成本,提升用户接受度。
八、末端执行器:灵巧手还是三指夹爪?
想让机器人真正"干活",末端执行器——也就是机械手——是最核心的部件之一。CES上已经可以看到兆威机电等企业展示的灵巧手产品,国内也涌现出大量从事灵巧手研发的创业公司。
灵巧手的现实挑战
人手的复杂度极高:仅一根食指就拥有四个自由度,一只手的自由度超过20个。要复刻这种精细度,灵巧手不仅需要大量的微型驱动器和传感器,还需要极高精度的力控能力和触觉感知(电子皮肤),导致成本居高不下。
三指夹爪:现阶段的务实选择
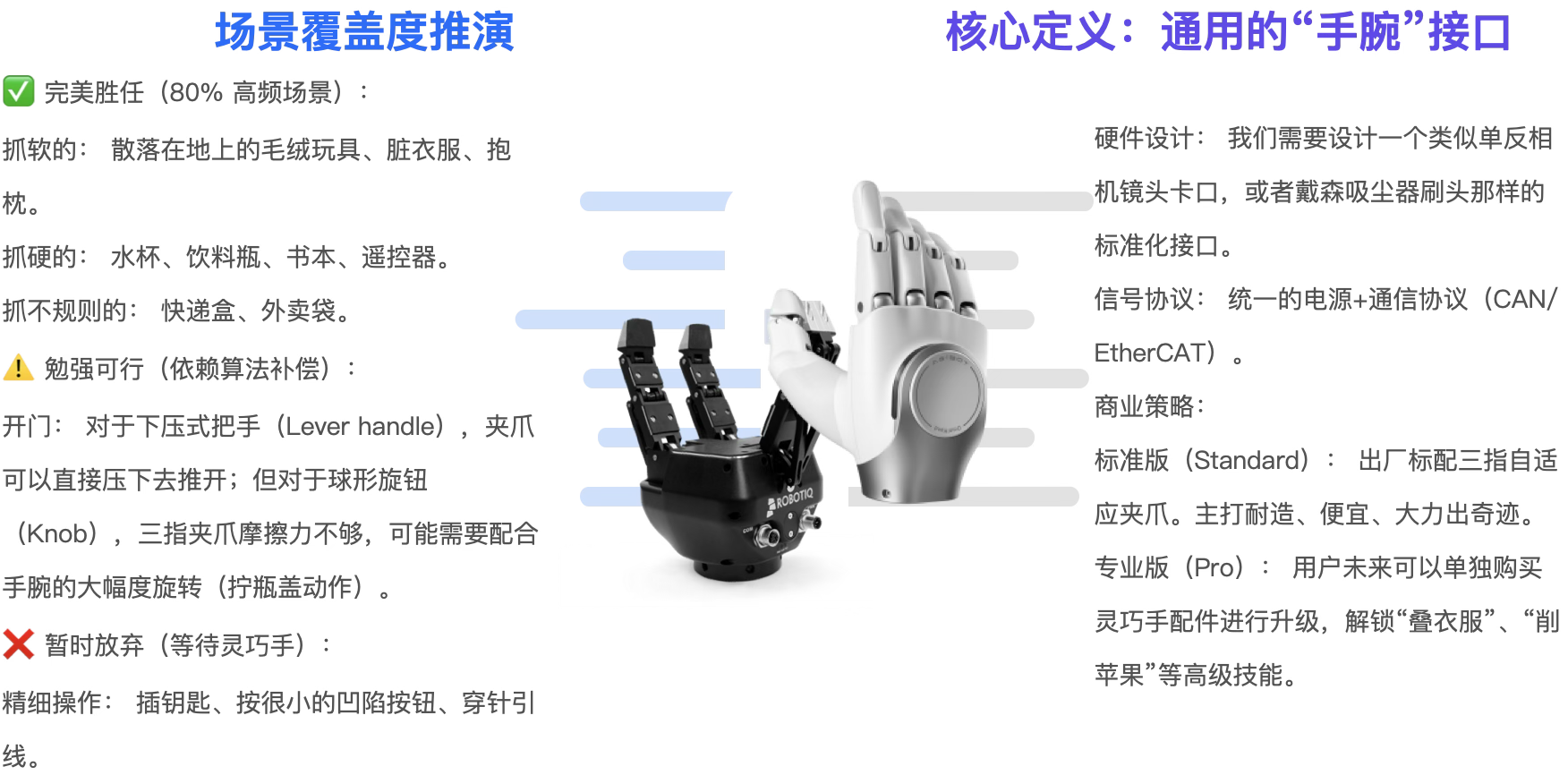
从家庭场景的实际需求推演来看,三指夹持方案基本能够胜任80%的高频操作场景:
软质物品: 抓取玩具、拿取衣服、移动抱枕等,均可完成。
硬质物品: 抓取杯子、拿取饮料瓶等日常物品,表现良好。
局限场景: 对于旋转小把手、拧瓶盖等精细操作,仍存在一定困难。
模块化接口:面向未来的可扩展设计
更合理的设计策略是采用统一的标准化接口,类似单反相机更换镜头的方式。现阶段在灵巧手成本尚无法快速下降的情况下,默认配置三指夹爪即可满足绝大多数需求;未来随着技术成熟和成本下降,用户可以通过更换更高级的末端执行器来获得更精密、更复杂的操作能力。这种可扩展的设计思路,既兼顾了当前的经济性,也为未来的功能升级预留了充足的空间。
短期最优硬件架构总结
综合以上分析,现阶段家庭机器人的最优硬件架构可以归纳为:
底盘: 差速驱动的全向轮式底盘
躯干: 可上下伸缩的直线躯干模组
手臂: 双臂结构,单臂6-7个自由度
末端执行器: 三指夹爪(支持模块化替换)
这样一台移动式家庭机器人,能够帮助用户完成相当一部分家务操作,在功能性、安全性、成本和用户接受度之间实现了较好的平衡。
九、功能演进:从"智能整理"到"全能管家"
第一阶段(0-3年):智能整理
现阶段应将功能充分收敛和聚焦。家庭场景中存在着大量未被充分满足的整理收纳需求——整理玩具、收纳衣服、拿快递、把衣服放进洗衣机、把碗碟放入洗碗机、挂衣服晾衣服……这些都是真实而高频的痛点。
扫地机可以扫地,洗碗机可以洗碗,但地面上的袜子需要有人捡起来,脏碗碟需要有人收到洗碗机里。这种非结构化的整理操作,正是目前家务自动化链条中缺失的关键一环。
机器人可以借助VLA模型识别地面杂物,执行分类归位操作,并与扫地机等家电联动。这类场景具有三个显著优势:高频刚需、技术容错度高(一次没捡起来可以再试一次)、能够较好地平衡成本与技术难度。 相比让机器人直接做饭或陪聊,整理收纳不仅更能切中用户的真实痛点,技术可行性也更高,是优先考虑的切入点。
此外,移动式安全看护也是短期内的重要需求。目前的家用摄像头只能静态查看,老人摔倒了无法主动响应。一台可以移动的机器人,至少能够在异常发生时第一时间抵达现场进行查看和报警,弥补了现有产品的重大局限。
第二阶段(3-5年):生活助手
在第一阶段的基础上,机器人需要具备与人更高频次交互的能力。老龄化社会带来了巨大的照护缺口:一方面大量老人需要照顾,另一方面劳动力短缺导致儿童看护同样面临困难。
这一阶段的机器人需要能够为老人和孩子递送物品、进行日常清洁,甚至在老人跌倒时提供一定的辅助。由于涉及高频次的人机交互,安全性要求将大幅提升,必须确保人机交互的绝对安全。
第三阶段(5-10年):机器人管家
机器人的自身能力与协同能力全面成熟,能够完成管家和保姆的大部分工作,并与工作、生活中的各类信息生态紧密结合,最终成为全能的家庭管家、生活保姆和工作秘书。
十、成本演进:规模效应与国产替代双轮驱动
家庭机器人能否大规模走进千家万户,持续降本是根本前提。
成本结构分析
当前这类机器人最大的成本集中在执行层——电机、减速器、丝杠等纯粹的物理部件。好消息是,这类成本严格遵循规模效应,大规模生产制造将带来显著的成本下降。
但短期内存在"先有鸡还是先有蛋"的困境:成本不下降就无法大规模生产,无法上量就无法进一步降成本。大规模资本的注入有望打破这一僵局——部分企业可能会为了抢占市场份额而采取激进定价策略,以规模换成本。
计算部分(芯片与算力)在现阶段的成本占比不高,但随着模型能力对算力需求的持续攀升,机器人在端侧需要高效实时执行复杂推理任务,这部分的成本占比将持续上升。
降本的四大路径
第一,国产化替代。 关键模块的国产化进程正在加速推进,部分核心部件已实现高达90%的成本下降,这是当前最显著的降本驱动力。
第二,供应链复用。 新能源汽车与机器人在电池、热管理、电机、芯片、传感器等领域有超过70%的供应链重合度。特斯拉、比亚迪、小米等造车厂商可以将汽车供应链的成本优势直接延伸至机器人领域,实现跨品类的成本拉通。
第三,软件定义硬件。 通过软件补偿算法降低对硬件精度的要求,使得普通工业级甚至民用级的机械零件能够满足使用需求,从而带来可观的成本下降。
第四,垂直一体化。 特斯拉已在德州工厂建立了机器人执行器的自有生产线;兆威机电等元器件供应商也在从单一零部件向一体化模组方向延伸。这种垂直整合模式能够有效压缩中间环节的成本。
家庭场景的特殊成本溢价
需要指出的是,家庭场景的机器人相较工业机器人存在一定的成本溢价需求:
安全成本: 工业机器人可以通过隔离措施保障安全,但家庭机器人必须具备高精度的电子皮肤和力控感知能力,确保不会对老人、孩子造成任何伤害。这部分传感器投入远高于工业机器人。
静音成本: 家庭环境对噪音高度敏感,一台嘈杂的机器人是无法被接受的,这对驱动系统和机械结构的静音设计提出了更高要求。
十一、结语
从CES展会的观察来看,家庭机器人的蓝图正在从概念走向现实。资本的大规模涌入、技术的加速迭代、供应链的持续成熟,正在共同推动这一进程。
短期(3年内),以"智能整理"为核心功能、以"轮式底盘+升降躯干+双臂+三指夹爪"为硬件形态的家庭机器人,有望率先实现商业化落地,填补家务自动化链条中的关键空白。
中期(3-5年),随着人机交互安全性的提升,机器人将进入"生活助手"阶段,在老人照护和儿童看护领域发挥更大价值。
远期(5-10年),全能型家庭管家机器人有望大规模走进千家万户,真正实现"AI养老"的愿景。
当然,硬件与产品形态只是决定机器人能否落地的一半因素。能够真正赋予机器人灵魂的,是它的大脑——机器人大模型。关于这一维度的深入分析,我们将在后续内容中展开探讨。
远景是美好的,道路是曲折的,但方向已经清晰。机器人养老的那一天,或许比我们想象的更近。
评论